Attitude e Orbit Control System: come ci si muove nello spazio?
Il sistema di controllo di assetto e orbita è un sistema complesso che permette di governare l’assetto e il moto di un velivolo spaziale. Solitamente con tale sistema, Attitude and Orbit Control System (AOCS), si fa riferimento all’insieme di due sottosistemi: l’Attitude Determination and Control System (ADCS), sistema che fornisce la stabilizzazione del velivolo, determina e controlla l’assetto mediante diversi sensori e attuatori. E il Guidance, Navigation and Control System (GNC), sistema che riguarda invece i moti orbitali e quindi le traiettorie dello spacecraft. Tale sistema risulta essere di cruciale importanza per il successo di missioni spaziali che prevedono manovre di rendezvous, docking e operazioni di prossimità. In questo articolo esploreremo nel dettaglio le possibili architetture e le tecnologie riguardanti il primo sottosistema.
Funzioni e architettura dell’Attitude e Orbit Control System
L’Attitude e Orbit Control System o “sistema di determinazione e controllo dell’assetto” stabilizza il moto del satellite, determina e controlla il suo orientamento annullando l’azione di qualsiasi tipo di disturbo. Queste funzioni sono fondamentali per qualsiasi tipo di missione spaziale, infatti lo spacecraft necessita un determinato assetto per diversi motivi, tra cui garantire corretto puntamento del payload, che sia una telecamera o un qualsiasi altro strumento scientifico; performare il controllo termico della struttura e permettere un adeguato funzionamento dei pannelli solari.
A seconda della tipologia di missione spaziale e dei vincoli ad essa associati, il sistema Attitude e Orbit Control System avrà bisogno di soddisfare diverse caratteristiche tecniche come ad esempio accuratezza di puntamento, velocità rotazionale (slew) o stabilità (jitter).
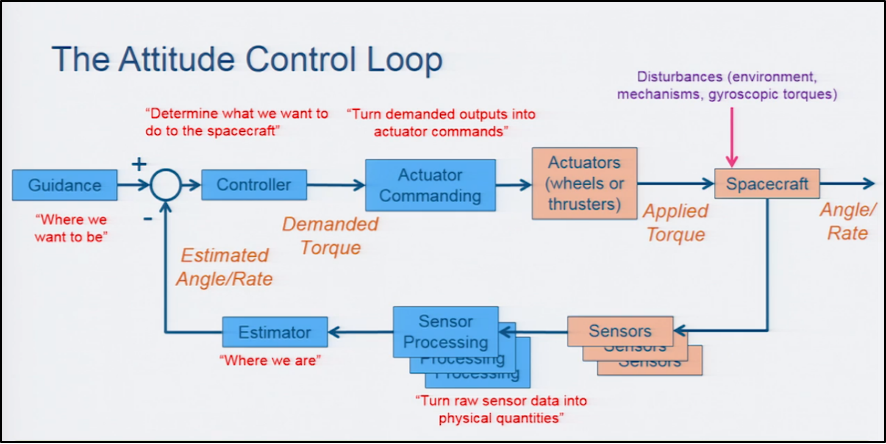
Nella figura seguente è riportato uno schema esemplificativo di diagramma a blocchi per il controllo di assetto. Il diagramma rappresenta una tecnica di controllo in anello chiuso e spesso si basa su una legge di controllo PID (proporzionale-integrale-derivativa). Questa permette generalmente di raggiungere le specifiche richieste di prestazioni e stabilità. Come visibile dallo schema, il sistema ha bisogno di sensori per determinare l’assetto del satellite e di attuatori per controllarne la direzione.
Prima di affrontare la tecnologia di sensori ed attuatori spaziali, vediamo quali tecniche è possibile sfruttare per controllare e stabilizzare lo spacecraft.
Stabilizzazione del satellite
Ci sono diversi metodi che permettono di controllare e stabilizzare il moto di un satellite, da quelli passivi a quelli attivi, dai più grossolani ai più accurati. Vediamo insieme le caratteristiche dei metodi più importanti.
Una prima semplice tecnica di stabilizzazione è quella che sfrutta il gradiente di gravità per mantenere la direzione di puntamento del satellite verso il nadir. Ciò è possibile per satelliti costituiti da due masse distinte, poste ad una certa distanza e collegate da una trave sottile e leggera. Grazie alla diversa distanza dalla Terra, le due masse saranno sempre soggette ad una forza di attrazione gravitazionale diversa. La combinazione di tali due forze genera una coppia di richiamo stabilizzante che mantiene il satellite nell’orientazione desiderata. Sebbene questo tipo di stabilizzazione non richieda alcun tipo di energia o propellente, essa garantisce un puntamento grossolano attorno all’asse nadir, non agisce sugli altri due assi, e genera una coppia limitata che decresce all’aumentare della quota.
Altra tecnica di stabilizzazione passiva è la quella magnetica. Questa richiede una conoscenza dettagliata delle linee di campo magnetico terrestre per poter effettuare un controllo comunque non accurato (accuratezza intorno a 5°-10°), a causa delle diverse irregolarità del campo geomagnetico.
La tecnica di stabilizzazione a spin era largamente utilizzata negli anni ’70 per i satelliti in orbita geostazionaria. In alcuni casi viene ancora sfruttata durante la fase di crociera di alcune missioni interplanetarie. Tale tecnica consiste nel porre in rotazione la piattaforma del satellite attorno ad uno dei suoi assi principali di inerzia generando così un vettore momento angolare fisso nello spazio inerziale. Tale vettore fornisce rigidezza giroscopica e quindi stabilizza lo spacecraft rendendolo meno vulnerabile alle perturbazioni esterne.
Subito dopo, dobbiamo citare il metodo di stabilizzazione a girostato, oppure detto dual-spin. Esso viene applicato a satelliti la cui struttura è caratterizzata da due componenti distinti. Il primo componente funge da stabilizzatore a spin, essendo posto in rotazione, mentre il secondo componente rimane fisso e viene utilizzato per il fissaggio del payload, così come venne fatto con le grandi antenne di IntelSat IV nel 1972 (visibile nella figura seguente).

La tecnica di stabilizzazione bias-momentum è una tipologia di stabilizzazione dual-spin, nella quale però la sezione che viene messa in rotazione consiste in una ruota di momento (momentum wheel) interna alla piattaforma principale.
Infine, abbiamo il metodo di stabilizzazione a tre assi, anche detto zero momentum stabilization, che oggi è molto usato in quanto garantisce performance elevate in termini di accuratezza e stabilità. Per applicarlo occorre applicare una ruota di reazione (reaction wheel) per ogni asse in maniera da poter compensare i disturbi o completare le varie manovre attorno a qualsiasi asse. Il sistema fornisce ottime prestazioni, tuttavia, la complessità data dai dispositivi meccanici, le vibrazioni indotte da tali meccanismi e la necessità di dispositivi di desaturazione delle ruote (magnetorquers o thrusters) sono alcuni dei più grandi svantaggi.
La tecnologia dei sensori nell’ambito dell’Attitude e Orbit Control System
Supponiamo di voler lanciare in orbita un satellite e di aver scelto la tecnica di stabilizzazione a tre assi detta zero momentum, la più accurata tra quelle elencate. A questo punto, prima di poter parlare del moto del satellite, occorre esaminare come lo stesso riesca a determinare il proprio assetto iniziale, in maniera tale da essere poi in grado di governarlo. Per questo, analizziamo le varie famiglie di sensori spaziali, in grado di mettere a disposizione dell’Attitude e Orbit Control System alcune informazioni indispensabili.
I sensori solari rilevano la presenza e/o l’orientazione del Sole rispetto al velivolo spaziale. Si tratta di una tipologia di sensore utile alla determinazione dell’assetto ma anche al mantenimento in ombra di eventuali dispositivi sensibili all’energia solare. La luminosità della nostra stella la rende un corpo facilmente rilevabile e discriminabile rispetto ad altri corpi celesti. Esistono diverse tipologie di sensori solari. Tra i rilevatori di presenza del Sole abbiamo ad esempio lo Shadow Bar Sun Presence Detector, lo Slit Sun Presence Detector nel quale delle foto celle giacciono appositamente sotto delle fessure, lo V-Slit Sun Presence Detector largamente usato per determinare l’orientazione dell’asse di spin del satellite rispetto al vettore solare.
Per rilevare in maniera più accurata l’orientazione relativa tra vettore solare e satellite, vengono usati l’Analog Sun Sensor ed il Digital Sun Sensor. Analizzando il sensore analogico, anche detto Cosine Sun Detector, vediamo che il principio di funzionamento si basa sul fatto che il flusso di energia totale sulla superficie della foto cella è proporzionale al coseno dell’angolo di incidenza del vettore solare. Per migliorare prestazione, accuratezza e range operativo del dispositivo, vengono usate due celle solari posizionate in maniera perpendicolare tra loro, grazie alle quali si ottiene la cosiddetta curva Kelly cosine, la quale descrive la potenza rilevata in funzione dell’angolo di incidenza.
Sensori infrarossi di orizzonte terrestre. Il pianeta Terra fornisce una direzione di riferimento per la determinazione dell’assetto del satellite. In questo caso i sensori hanno un principio di funzionamento differente rispetto a quelli solari in quanto la Terra non può essere approssimata a una sorgente luminosa puntuale, data la sua vicinanza ai satelliti. Il sensore osserva lo spazio cercando di rilevare l’orizzonte terrestre. Per fare ciò viene utilizzato un sistema ottico di lenti e filtri insieme ad una unità di elaborazione del segnale. Per evitare ambiguità durante le misurazioni si tende a sfruttare la regione spettrale degli infrarossi. In particolare il range tra 14 e 16 micrometri, nella quale l’albedo terrestre possiede una distribuzione di energia circa uniforme indipendentemente dal periodo di acquisizione (giorno/notte) o dalla tipologia di superficie riflettente (terra/mare). Tra i sensori di Terra si distinguono gli Horizon Crossing Sensors e gli Static Horizon Sensors.
Sensori stellari, i cosiddetti star trackers, permettono di ottenere le informazioni di assetto più accurate in assoluto tra tutti i sensori satellitari. Questi dispositivi solitamente basati sulle camere CCD (charge coupled device) godono di una larga apertura che permette di rilevare le sorgenti luminose deboli derivanti da numerose stelle. Successivamente, le posizioni delle stelle di riferimento rilevate vengono confrontate con appositi cataloghi stellari quali ad esempio Hipparcos (dalla omonima missione ESA che ha tracciato la posizione di più di un milione di stelle) o Bright Star Catalog (riguardante grosso modo tutte le stelle visibili a occhio nudo da Terra). Nonostante le performance eccellenti, il sistema è caratterizzato da elevata complessità sia per quanto riguarda il lato hardware che quello software necessario per effettuare le multiple operazioni di matching tra rilevazioni e cataloghi.

Magnetometri. La misurazione di intensità e direzione del campo magnetico terrestre è ormai cosa molto comune nei sistemi di determinazione dell’assetto di satelliti in orbita bassa. Si tratta, infatti, di una tecnologia affidabile, economica, semplice e dalla massa limitata. La rilevazione del campo viene combinata con un modello noto del campo magnetico della Terra (International Geomagnetic Reference Field) rendendo possibile così il calcolo dell’orientazione del velivolo spaziale. Tuttavia, questi dispositivi vengono usati per performare acquisizioni grossolane a causa della bassa accuratezza intrinseca del sistema, data principalmente dalle anomalie presenti nel campo geomagnetico.
I sensori giroscopici sono una ben nota tecnologia molto usata anche in ambito spaziale per controllare la velocità di rotazione del satellite e per rilevare l’assetto del velivolo nel momento in cui i sensori di Terra o Sole sono oscurati da un’eclissi. Gli svantaggi maggiori di questi dispositivi sono dati dalla bassa affidabilità e dal limitato tempo di vita associati alle parti rotanti. Tuttavia, negli ultimi anni sono stati sviluppate nuove tipologie di sensori giroscopici come giroscopi laser, sensori mems, giroscopi a fibra ottica i quali non includono organi rotanti. Questi sensori solitamente costituiscono parte della inertial measurement unit, unità di misurazione inerziale data dall’utilizzo di giroscopi ed accelerometri disposti sui tre assi e comprensiva di elementi ridondanti.
Una volta esplorate le tecnologie caratteristiche dei sensori satellitari, è bene puntualizzare che ogni satellite necessiterà di una combinazione di questi ultimi. Infatti, a seconda della tipologia di missione e quindi delle prestazioni richieste, bisognerà fare affidamento su un insieme di informazioni che non potranno mai essere garantite da una sola tipologia di sensori.
Ad esempio, in una generica missione spaziale, dopo la separazione del payload e dopo aver completato la fase di detumbling, viene solitamente performata una determinazione iniziale e grossolana dell’assetto. Per completare tale operazione vengono usualmente sfruttate le misurazioni delle direzioni di riferimento del vettore solare e del vettore del campo geomagnetico, dando luogo alla cosiddetta acquisizione di assetto sun-mag. Dopo questa prima fase operativa del sistema ADCS, solitamente si passa in una seconda modalità di controllo accurata. Pertanto, si utilizzano in tal caso le tecnologie più performanti quali ad esempio gli star trackers, ottenendo la possibilità di governare l’orientamento del satellite in maniera fine.
Come applicare la coppia di controllo nell’Attitude e Orbit Control System
Così come accade per i dispositivi di rilevamento dell’assetto, anche la scelta degli attuatori da installare a bordo del satellite è determinata dalla tipologia di missione che si va ad affrontare e dalle relative performance richieste. Sono disponibili diverse tecniche per generare la desiderata coppia di controllo, possiamo riassumerle grossolanamente in tre macrocategorie:
Per il sistema propulsivo possono essere usati dei piccoli thrusters per produrre spinta e di conseguenza coppia attorno al centro di massa dello spacecraft. Per fornire il controllo completo attorno ai tre assi, sono solitamente montati diversi dispositivi sulle varie superfici esterne del velivolo spaziale. I thrusters per applicazioni satellitari possono basarsi su diversi principi di funzionamento.
I cold gas jets costituiscono l’esempio più semplice e affidabile, consistente in piccoli jets che controllano l’accelerazione del gas di scarico mediante un serbatoio ausiliario contenente gas inerte pressurizzato. Possono poi essere usati i classici propulsori chimici, dai rocket a propellente solido a quelli a propellente liquido, mono e bi-propellente.
Nel caso dei thrusters mono-propellente viene sfruttata la reazione di decomposizione tipicamente di idrazina o perossido di idrogeno. Salendo con la complessità e con il peso del sistema, abbiamo i thrusters a bi-propellente che seguono il principio di funzionamento degli endoreattori e possono contare su diverse combinazioni di combustibile e ossidante, tra cui ad esempio la nota coppia monometil-idrazina/idrazina.
I dispositivi di scambio del momento angolare sono le momentum wheels e le reaction wheels. Essi agiscono secondo il principio di conservazione del momento angolare, mettendo quindi in rotazione delle masse all’interno del corpo del satellite e traferendo il momento angolare tra le varie sezioni dello stesso, senza variare il momento globale.
La prima tipologia di ruote citate, momentum wheels, forniscono un momento angolare costante garantendo stabilità giroscopica. Mentre, la seconda tipologia fornisce coppia allo spacecraft aumentando o riducendo la velocità di rotazione della ruota in questione, la quale si trova quindi a riposo in condizioni non operative.
Gli attuatori magnetici, o Magnetorquers, sono largamente usati specialmente sui piccoli satelliti grazie a basso costo, semplicità, buona precisione di controllo. La coppia di controllo in tal caso è generata dall’interazione del momento magnetico generato dallo spacecraft con il campo magnetico terrestre.
Ogni satellite sarà equipaggiato con una combinazione di tali attuatori, garantendo la possibilità di governare il moto della navicella in qualsiasi momento della missione e in qualsiasi punto dell’orbita, sfruttando i vantaggi caratteristici di ogni tecnologia.
Ad esempio, le momentum/reaction wheels forniscono un controllo altamente accurato senza la necessità di utilizzare propellente. Nello specifico, mediante opportuno controllo in tensione dei motori elettrici che alimentano le ruote, è possibile raggiungere velocemente l’assetto desiderato. Di contro, tali organi posti in rotazione costituiscono dei sistemi complessi e poco affidabili specie per applicazioni spaziali.
Sono adottate per questo motivo delle soluzioni ridondanti che permettono di allungare la vita utile del sistema. Peraltro, dopo aver effettuato numerose manovre e dopo aver eliminato i vari disturbi per diversi anni, le ruote di reazione possono raggiungere la velocità massima rendendo così indispensabile l’operazione di desaturazione delle stesse. Dunque, la fase di desaturazione determina un legame importante tra la tecnologia delle ruote di momento e quella dei thrusters o dei magnetorquers, queste dovranno essere inevitabilmente usate in combinazione.
Per quanto riguarda i thrusters invece, solitamente indicati col termine reaction control system, abbiamo quasi una situazione duale rispetto alle wheels. Infatti, questi costituiscono un sistema più semplice (almeno per alcune famiglie di propulsori) e quindi più affidabile. Tuttavia, questi hanno una vita limitata a causa dell’alimentazione a propellente, ed inoltre non garantiscono la stabilità asintotica. Infatti, pur modulando in frequenza gli impulsi generati dai thrusters, saremo sempre costretti a rimbalzare intorno alla direzione desiderata, con l’ugello che spara periodicamente prima in una direzione e poi in quella opposta.
Un esempio pratico, il Solar Orbiter
Vediamo le caratteristiche principali di un di sistema di controllo di assetto e orbita, relativo a una missione particolarmente estrema come quella del Solar Orbiter. Essa ha avuto inizio con il lancio dello scorso 10 febbraio mediante il vettore Atlas V. La missione si propone di rispondere a domande complicate riguardanti il plasma del vento solare, il campo magnetico della corona solare, le radiazioni energetiche generate dalle eruzioni solari ed a tante altre questioni delicate.
Per questo motivo il satellite deve effettuare diverse misurazioni in vicinanza della nostra stella, a circa 0.28 unità astronomiche, e in corrispondenza di regioni ad elevata latitudine, almeno 30 gradi. Questi vincoli orbitali vengono rispettati grazie a una traiettoria interamente balistica che sfrutta una serie di gravity-assist di Terra e Venere. Ecco che entra in gioco l’Attitude e Orbit Control System.

Per poter svolgere questi compiti in un ambiente così ostile e duro, la progettazione del AOCS del Solar Orbiter ha costituito una fase cruciale. Peraltro, in questo caso il sistema viene affiancato dal Failure Detection, Isolation & Recovery System (FDIR), sistema in grado di rilevare, isolare e risolvere eventuali guasti determinati dalle continue sollecitazioni date da temperatura e radiazioni.
Il sistema AOCS del satellite in questione è caratterizzato da elementi classici tipici delle missioni interplanetarie con la peculiarità data dal computer di bordo in grado di gestire tutti i processi. L’apparecchiatura del Solar Orbiter include:
- 2 fine sun sensors
- 2 inertial measurement units, con 4 giroscopi e 4 accelerometri orientati in maniera tetraedrica
- 2 star trackers
- 4 reaction wheels
- 2 sistemi propulsivi a bi-propellente, ciascuno con 9 thrusters
Per comprendere ancora meglio la complessa architettura di un sistema satellitare del genere, osserviamo nella seguente tabella come il sistema AOCS del Solar Orbiter sia organizzato secondo cinque diverse modalità di funzionamento, per ognuna delle quali troviamo la combinazione di diversi sensori e attuatori.
| Modalità | Funzioni | Caratteristiche |
| Standby mode, SBM | Elaborazione dati unità di base. Modalità attivabile solo ad avvio sistema. | Nessuna misurazione di assetto, nessuna attuazione. |
| Sun Acquisition and Survival Mode, SASM | Capacità di smorzare la velocità, mantenimento della posizione di eclissi, capacità di rotazione per rilevazione del Sole, puntamento e cattura autonoma del Sole. | Utilizzo di sensori solari e giroscopici, attuazione mediante thrusters. |
| Wheel Safe Mode, WSM | Come la modalità SASM, senza capacità di smorzamento della velocità, rilevamento e cattura del Sole solo per piccoli angoli. Modalità attivabile da SASM o NCM. | Come in modalità SASM, attuazione mediante reaction wheels. |
| Normal Control Mode, NCM | Completo controllo triassiale, principale modalità operativa durante la fase di crociera per performare le osservazioni scientifiche. | Utilizzo di sensori giroscopici e di star trackers, attuazione mediante reaction wheels. |
| Orbit Control Mode, OCM | Completo controllo triassiale, con la funzionalità aggiuntiva di fornire una variazione di velocità per il controllo dell’orbita. Modalità usata in prossimità delle manovre di gravity-assist con la Terra. | Come in modalità NCM, attuazione mediante thrusters. |
Articolo a cura di Michele Fragnelli