Ad oggi, l’ultima frontiera dell’esplorazione spaziale abbandona forse l’idea di adottare devices grandi e pesanti in favore di un approccio innovativo quanto minimal. Da sempre oltre al resto dell’universo, l’uomo cerca di carpire più informazioni possibili sul pianeta rosso. Al fine di perseguire tale obiettivo, i ricercatori cinesi della Nanjing University of Aeronautics and Astronautics hanno ideato un piccolo robot a quattro zampe che prende ispirazione dalle fattezze di una lucertola.
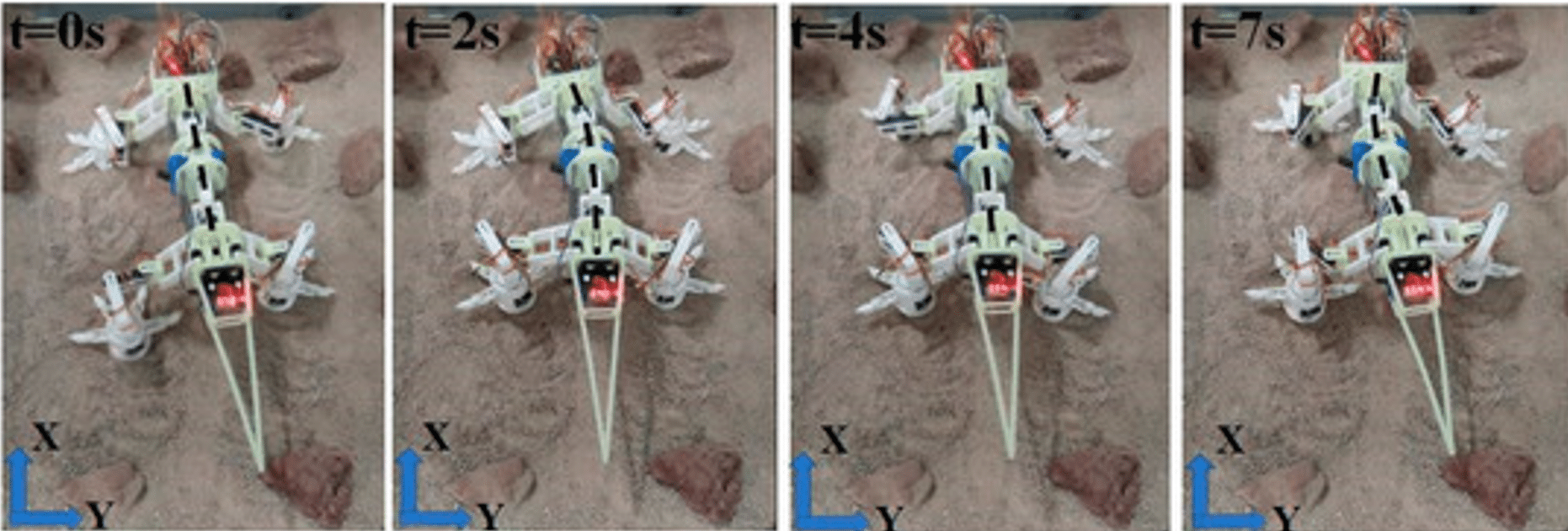
La somiglianza al rettile non è solo caratterizzata dall’apparenza, ma ne rispecchia anche le movenze, riuscendo a strisciare sul terreno come un vero e proprio rettile.
L’obiettivo primario e che sta alla base dell’idea, è quello di creare un device che possa adattarsi ad ogni tipologia di terreno.
Il gruppo di ricercatori cinesi ha messo a punto un prototipo di lucertola costituito da 6 zampe lunghe 13 centimetri e con un meso di appena 150 grammi. Lo scopo finale è la maneggevolezza: ovvero ottenere un device in grado di spostarsi non solamente su terreni granulosi e impervi, ma perlopiù cedevoli. Al momento infatti, per i rover vi è un rilevante rischio relativo a ribaltamenti e difficoltà correlate alle ruote.
Anche se non è immediatamente intuitivo pensarci infatti, sono proprio i rover più piccoli che soffrono di questi problemi. In generale, la maggior parte degli studi relativi alla mozione dei robot sono estrapolati in base all’applicazione di equazioni dinamiche nel solo nel caso di superfici rigide, piane e non scivolose.
Per ovviare a tale problema, gli scienziati si sono ispirati alla dinamica dei movimenti delle lucertole per cercare di sfruttare la loro agilità di moto nei terreni ghiaiosi. Il robot creato dai ricercatori Daniel Goldman e Chen Li è stato testato su superfici ricoperte da vari tipi di granulati, tra cui semi di papavero, perle di vetro e sabbia naturale.
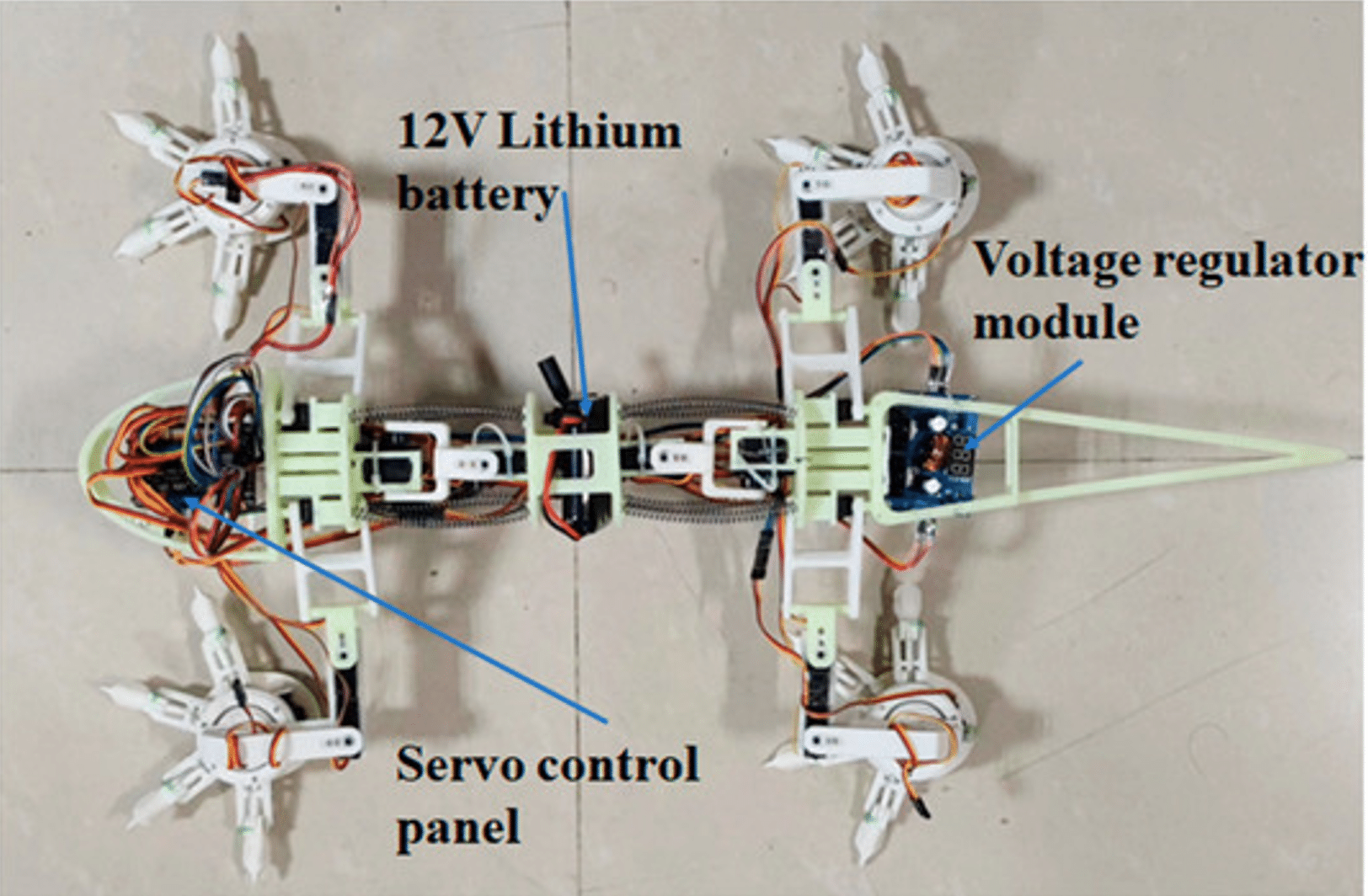
La ricerca è stata sviluppata tramite due fasi: una di simulazione e una di osservazione dove è stato studiato un prototipo in 3D. Ma come si muove il robot? La lucertola artificiale è formata oltre che dalle 6 zampe anche da una colonna vertebrale flessibile che si poggia su 4 gambe. Il corretto movimento ondulatorio proprio dei rettili è stato simulato tramite un’oscillazione generata da un ingranaggio e due cerniere presenti all’interno della gamba.
Le articolazioni artificiali sono state rese tramite l’utilizzo di due servomotori e un meccanismo apposito che alza il prototipo e ne mantiene l’equilibrio. Ovviamente, tutti i movimenti sono determinati da modelli cinematici che tengono in considerazione tutte le parti del rettile artificiale, compresi piedi gambe e colonna vertebrale.
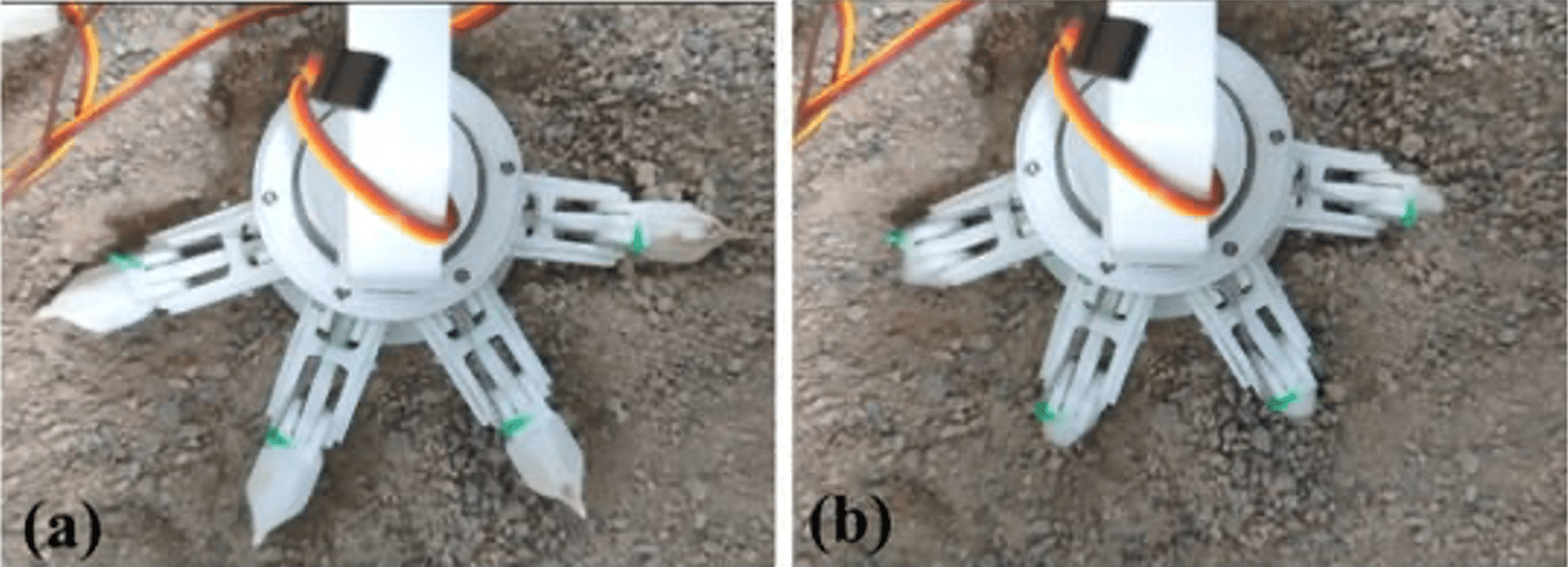
Questa nuova soluzione è attualmente la più innovativa e lungimirante, specialmente se si riflette sulle difficoltà relative al suolo del pianeta rosso. Quello che però colpisce davvero del robot è caratterizzato dalle zampe. Gli scienziati si sono accorti, mentre studiavano le fattezze della lucertola artificiale, che sono gli arti convessi che donano prestazioni migliori grazie ad una spinta verticale ed una resistenza ridotta.
Secondo quanto dichiarato dal ricercatore Daniel Goldman “cambiando la forma dell’arto in modo che fosse piatto o concavo, la performance calava. Questa informazione è importante per ottimizzare l’efficienza energetica delle zampe dei robot.”
Lo scienziato ha anche dichiarato come “usando le equazioni ‘terradinamiche’, la nostra simulazione è risultata non solo altrettanto accurata di una simulazione basata sul consolidato metodo di simulazione degli elementi discreti, o DEM, ma anche computazionalmente molto più efficiente”. La ricerca rimane sorprendente e inaspettata, ma potrebbe essere un altro passo in avanti verso lo spazio e verso Marte.
A cura di Luisa Bizzotto
{kind=link}
{kind=link}
{kind=link}