Robot NASA SWIM: nuoteranno ed esploreranno mondi oceanici
Giusto qualche tempo fa, il famoso rover Perseverance della NASA, raccoglieva campioni di suolo marziano, per trovare resti di antica vita microbica. Ma Marte non è l’unico pianeta nel mirino degli scienziati candidato all’esplorazione per la ricerca di forme di vita. Di notevole interesse, anche lune del nostro sistema solare come Encedalo, Europa, Titano, che loro ritengono abbondanti d’acqua. Come fare quindi, per sondare tali riserve, sotto spesse croste di ghiaccio? La risposta è nei robot NASA SWIM, un progetto che mira a sviluppare dispositivi che nuoteranno al di sotto delle superfici gelide.
Robot NASA SWIM, l’unione fa la forza
Nelle intenzioni dei suoi promotori ci sarebbe la volontà di ridurre i rischi e migliorare la ricerca scientifica. Infatti la vera innovazione è l’uso dei piccoli dispositivi nuotatori molto più piccoli degli altri prototipi di robot per l’esplorazione di oceani extraterrestri.
Per accedere a questi ambienti acquatici, la NASA sta sviluppando e facendo maturare numerosi concept di missione oceaniche. Tra questi, classi di robot termomeccanici di perforazione denominati Scientific Exploration Subsurface Access Mechanism for Europa (SESAME). SWIM dovrà espandere drasticamente le capacità delle missioni robotiche di accesso all’oceano dei SESAME. Aumenteranno così significativamente la probabilità di rilevare tracce di abitabilità, vita e biomarcatori.
Samuel Howell, altro componente del JPL, paragona SWIM all’elicottero Ingenuity di Marte, compagno di volo del rover Perseverance. Ingenuity estende la portata del rover, fornendogli immagini del suo ambiente circostante e aiutandolo nell’esplorazione. Allo stesso modo l’insieme dei micro robot, operando insieme, apportano benefici al modulo principale.
Caratteristiche e funzionamento
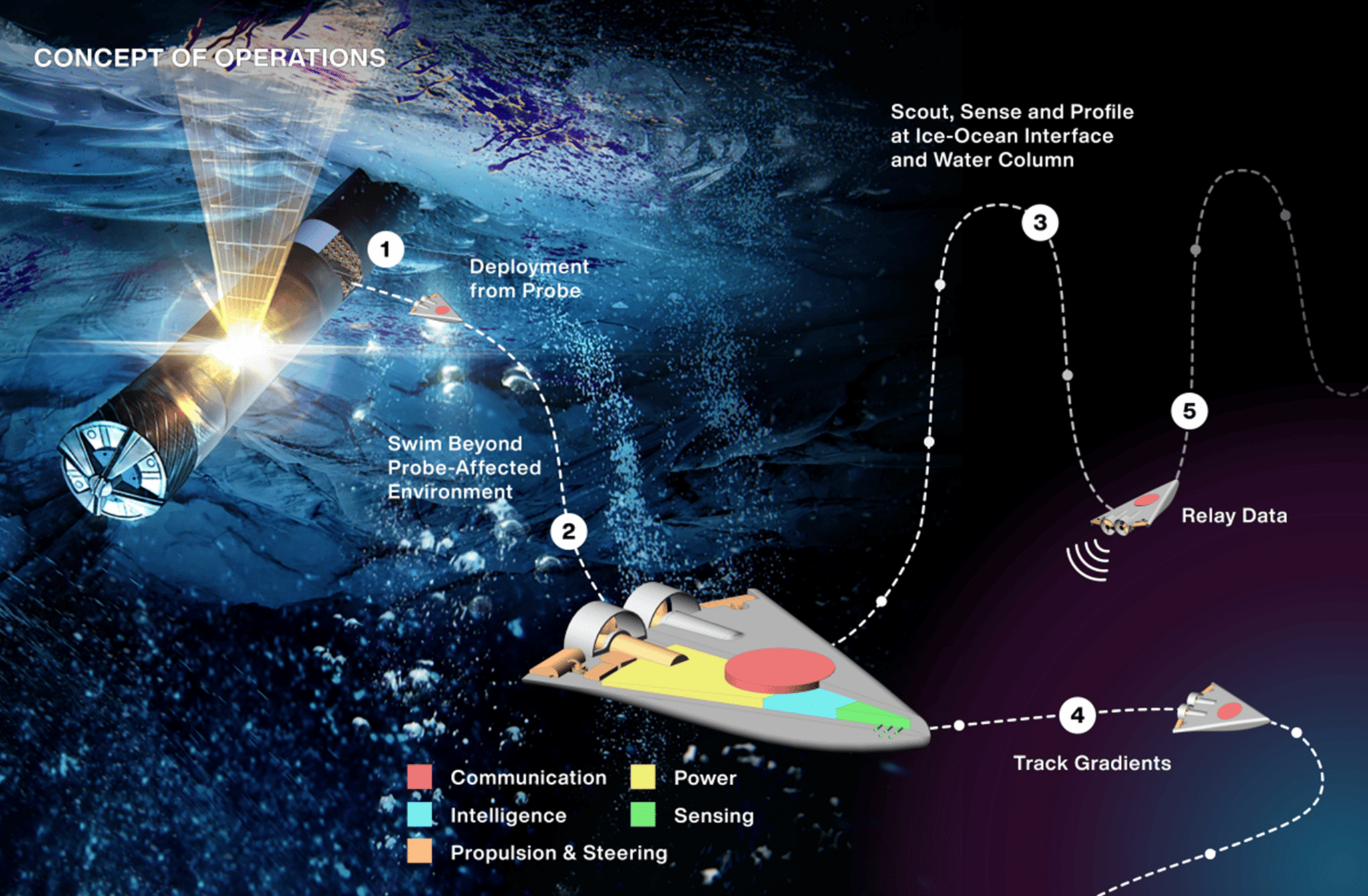
Il sistema SWIM è costituito da micro-robot nuotatori (micro-swimmer) stampati in 3D e dell’ordine dei cm. Sono dotati di sensori MEMS, spinti da attuatori miniaturizzati e controllati in modalità wireless con onde a ultrasuoni. Un singolo robot-madre SESAME ha una mobilità limitata una volta raggiunto il confine tra oceano e ghiaccio; motivo per cui i micro-nuotatori dovranno dispiegarsi singolarmente o come sciame da esso. Il vantaggio, appunto, è proprio questo: SWIM consente di campionare attivamente l’acqua dell’oceano al di là della portata del robot SESAME.

Ogni componente dello sciame ha anche semplici sensori per la temperatura, la salinità, l’acidità e la pressione oltre a sensori chimici per biomarcatori. Inoltre, potrebbero “raggrupparsi” insieme in un comportamento ispirato a pesci o uccelli, riducendo così gli errori nei dati attraverso le loro misurazioni sovrapposte.
Un altro problema risolto da SWIM è la raccolta sicura di dati. La sonda che contiene i micro-robot, per sciogliere il ghiaccio e creare così una via verso il basso si affida alle roventi batterie nuclari. Queste creano calore che, nell’oceano genera una bolla termica che scioglie il ghiaccio soprastante. Il che in termini pratici interferisce con la raccolta dati perchè il calore causa reazioni che possono cambiare la chimica dell’acqua.
Il progetto
Il concept, dietro l’idea di Ethan Schaler, è l’acronimo di “Sensing With Independent Micro-Swimmers”. Ingegnere robotico al Jet Propulsion laboratory della NASA, la sua idea è stata premiata con 600000 dollari di fondi. A farlo, il programma NIAC che vaglia progetti attraverso varie fasi di approvazione.

Nella I fase, tecnici hanno valutato la fattibilità di funzionamento in modalità wireless a distanze di diversi metri da un robot madre attraverso 2 attività. La possibilità di eseguire compiti e rendere adatti i dipositivi per una missione robotica di classe SESAME della NASA su situazioni oceano-ghiaccio.
Uno studio commerciale sulla progettazione dei micro-nuotatori poi, ha determinato il design e le dimensioni adatte dei robot. Questo per utilizzare gli strumenti scientifici disponibili alle distanze di esplorazione e nelle condizioni oceaniche previste.
Nella fase II, gli ingegneri estenderanno la fattibilità tecnica dei robot SWIM per le missioni scientifiche NASA all’esplorazione ghiaccio-oceano di mondi oceanici come Europa. Lo faranno portando a termine i seguenti 5 compiti principali:
- Progettazione, prototipazione e test del sistema per dimostrare la localizzazione e controllo per robot, il controllo dello sciame e il rilevamento del gradiente di segnale.
- Simulazioni per identificare concetti di operazioni e strategie di esplorazione dello sciame con alta affidabilità e requisiti hardware minimi.
- Sviluppo del carico utile dei sensori per progettare, fabbricare e testare una suite di sensori adatti, costruiti con sensori COTS e poi fabbricati con MEMS.
- Implementazione della comunicazione per progettare e fabbricare nodi di trasduttori a ultrasuoni e implementare e testare un protocollo di comunicazione a due vie in acqua.
- Creazione dei controlli per dimostrare e caratterizzare la mobilità in acqua, la stima dello stato e il controllo ad anello chiuso.